
Tento ručně vyrobený cyberdeck je navržen jako odolný, kompaktní a plně funkční mobilní systém inspirovaný postapokalyptickou estetikou.
Srdcem cyberdecku je Raspberry Pi 4 Model B (4GB), doplněný o 120GB SSD.
Napájení zajišťují tři 10Ah Li-Pol baterie (111Wh).
Hlavní ovládání je přes 7″ LCD dotykovou obrazovku, vestavěnou kompaktní klávesnici a přehledný ovládací panel.
Cyberdeck je vybaven řadou vstupů a výstupů pro rozšíření včetně zdířek pro regulovaný zdroj (1,2-39V), univerzálních I/O zásuvek s podporou I2C, 1-Wire a dalších rozhraní, osciloskopu a funkčního generátoru.
Cílem je vytvořit vysoce odolné a funkční zařízení, které zvládne extrémní podmínky a umožní i práci v terénu. Základní koncept je jasný — nezničitelný cyberdeck s dlouhou životností a širokými možnostmi připojení.

O něčem takovém jsem přemýšlel už dávno, přenosný univerzální systém na kterém můžu kdykoli a kdekoli provádět prototypování, ladění, měření, řízení, programování, a vůbec všechny ty super věci. A mimo jiné bude sloužit i pro paření starých her – k tomu slouží DOSbox.
Základní otázkou byl výběr pouzdra které bude sloužit jako ochranný obal a zároveň držet všechno pohromadě. Mělo to být něco dostatečně pevného a robustního, nejlépe voděodolného, ale zase ne moc velkého. Jako rozumný kompromis jsem nakonec vybral plastový vodotěsný kufr Tactix.

Technické parametry:
- Rozměry (š x dx v): 345 x 295 x 154 mm
- Materiál: plast.
- Voděodolný: IP 65
- Předřezaná pěnová výplň
- Možnost uzamknutí pomocí visacích zámků
Vnitřní rozměry:
- Šířka: 315 mm
- Délka: 235 mm
- Hloubka spodní části: 100 mm
- Hloubka horní části: 30 mm
Kufr je opravdu masivní a vypadá že něco vydrží. Tím by byl daný základ do kterého je potřeba naskládat všechno potřebné.
Další na řadě bylo osazení víka. Po rozměřování, prohrabání zásob a rozhodování co tam všechno dát bylo rozhodnuto:
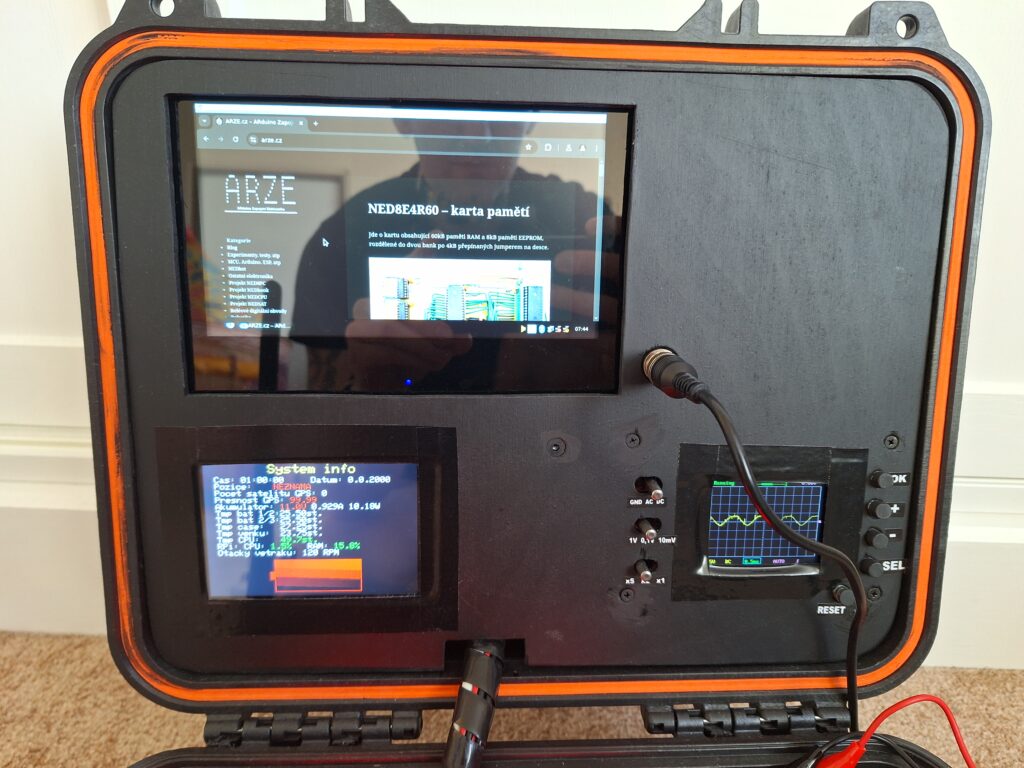
- 7″ 1024×600 IPS monitor pro Raspberry Pi, HDMI, dotykový
- 4.0″ 480×320 TFT displej, ST7796, SPI — pro zobrazování systémových informací
- Digitální Osciloskop DSO138 200khz
- GPS Modul GY-NEO6MV2
Monitor jsem přilepil oboustrannou páskou 3M VHB, GPS modul připáskoval ke kabelům a pojistil tavným lepidlem a zbytek přišrouboval nebo přilepil ke krycímu panelu. Ten je vyřezaný z 3mm překližky. Ovládací prvky osciloskopu jsem musel vybavit novými hmatníky (upravené šrouby M8) a posuvníky (6mm kolíky s vnitřním závitem) a na konektor pro připojení nasadit úhlovou redukci.


Panel drží na několika distančních sloupcích — 6mm kolíky s vnitřním závitem zalisované a zalepené do převrtaných šestihranných matek — přilepených do kufru lepidlem Mamut. Rámečky kolem displejů zakrývající nerovnosti a kraje jsou z izolační pásky. Svazek kabelů je omotaný spirálovým chráničem.
Tím bylo víko dokončené.
Před začátkem osazování těla kufru bylo potřeba vyvrtat jediné díry ve vnějším
obalu a to 4 díry pro konektory v boční straně.

Použil jsem vodotěsné konektory a ještě je pojistil silikonem. Z leva:
- USB-C
- RJ45
- 9-pin I/O
- 4-pin pro nabíjení
Teď už bylo na řadě osazení vnitřku těla.
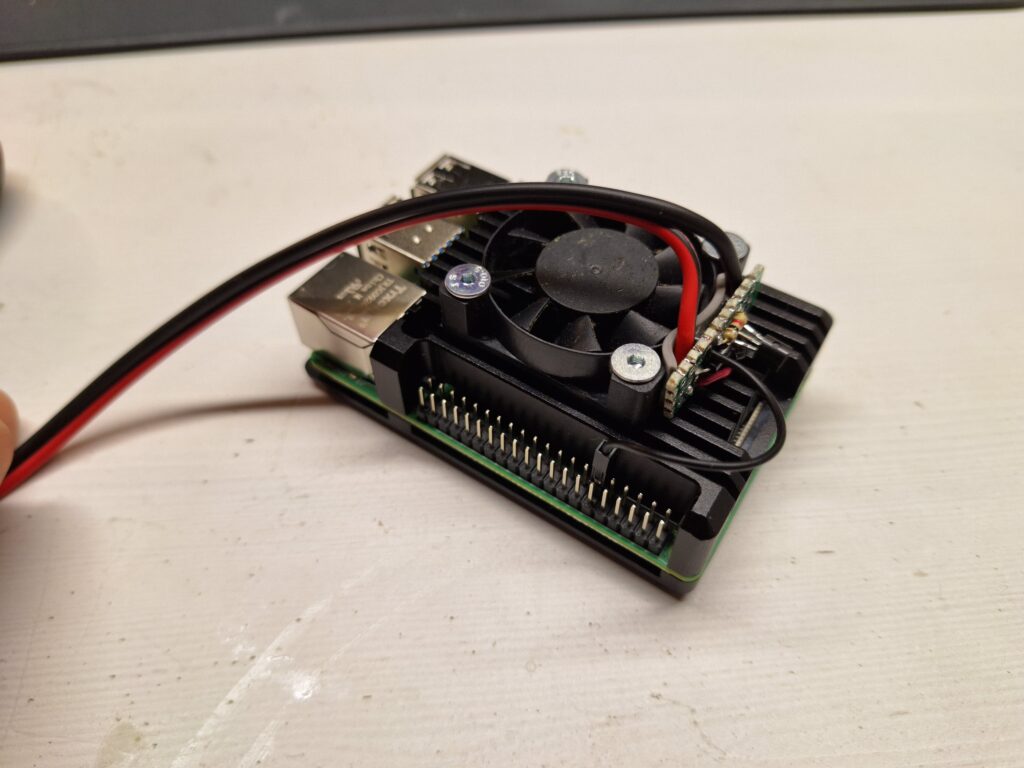
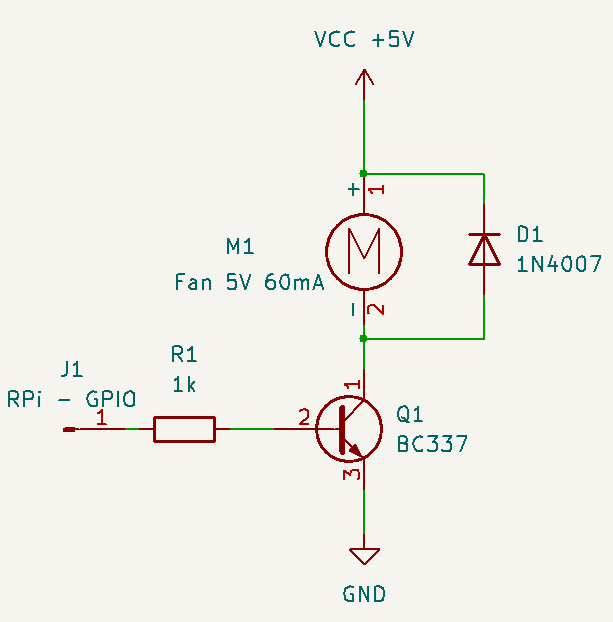
Jako hlavní mozek slouží RPi 4B s 4GB RAM s chladící krabičkou a 5V ventilátorem řízeným z RPi jednoduchým tranzistorovým spínačem.
Pro uložení systému a dat je použitý 120GB USB SSD disk a pro rozšíření USB 3.2 HUB a USB 2.0 HUB s vypínači. Jako vstupní zařízení je použitá nízká USB klávesnice a bezdrátová USB myš. Případně lze využít dotykový displej nebo připojit USB retro SNES ovladač.
Pro připojení k síti lze použít kabel se standartním RJ45 konektorem. Bohužel použití chladící krabičky odstínilo wifi v RPi která se tím stala nepoužitelnou, proto jsem pořídil USB wifi adaptér který problém vyřešil.
Zdroj energie tvoří tři Li-pol články zapojené do série přes ochranný BMS obvod, které poskytují 111Wh energie při 11,1V.
Napájení všech 5V zařízení zajišťuje DC-DC měnič s výkonem až 300W.
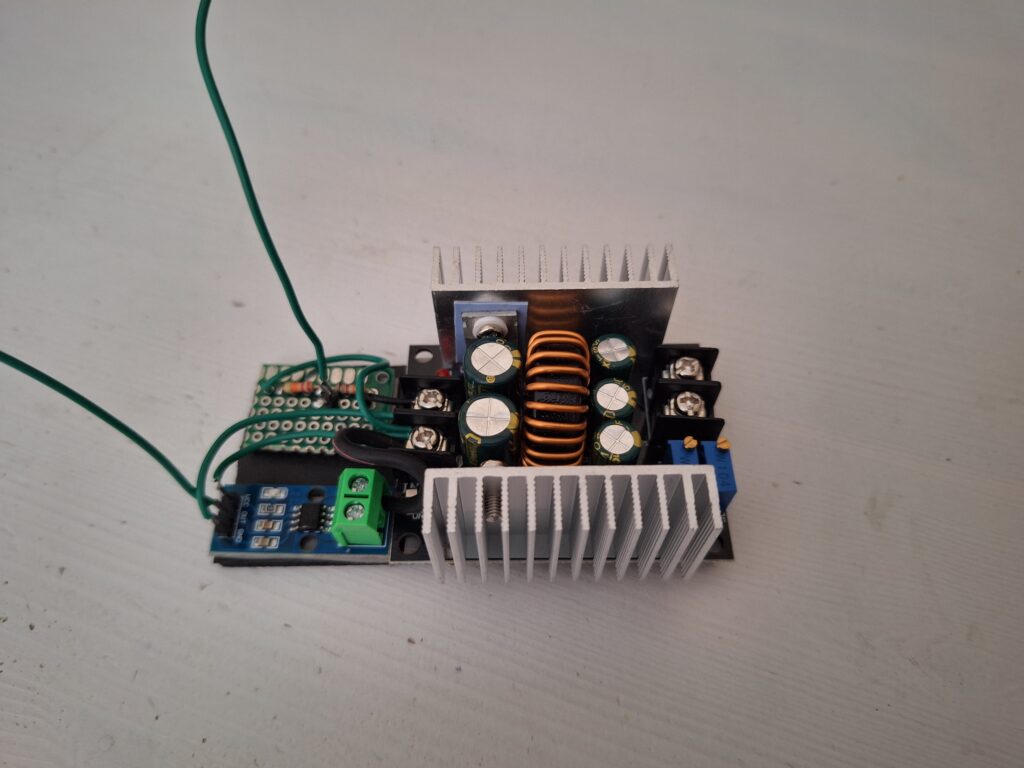
DC měnič s původními obvody pro měření napětí a proudu
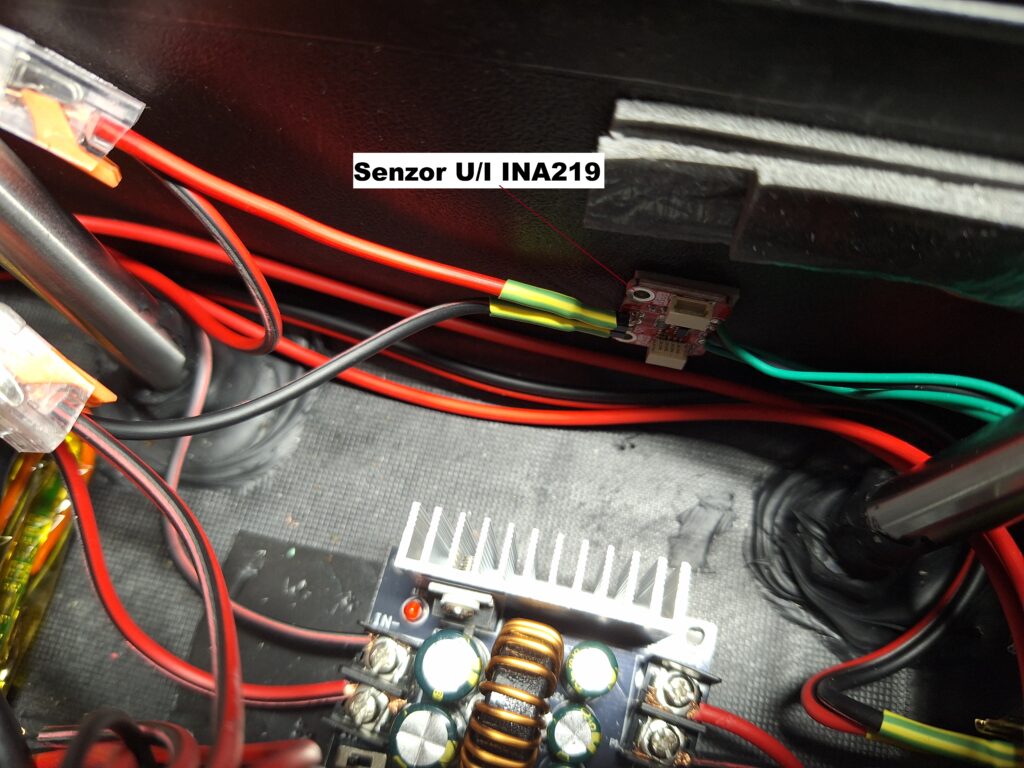
K monitorování stavu akumulátoru tj. napětí a poskytovaného proudu jsem použil obyčejný napěťový dělič a proudový modul ACS712. Bohužel se ukázalo že přesnost je silně nevyhovující a tak jsem je nahradil modulem INA219 který monitoruje napětí i proud a odesílá data po I2C.
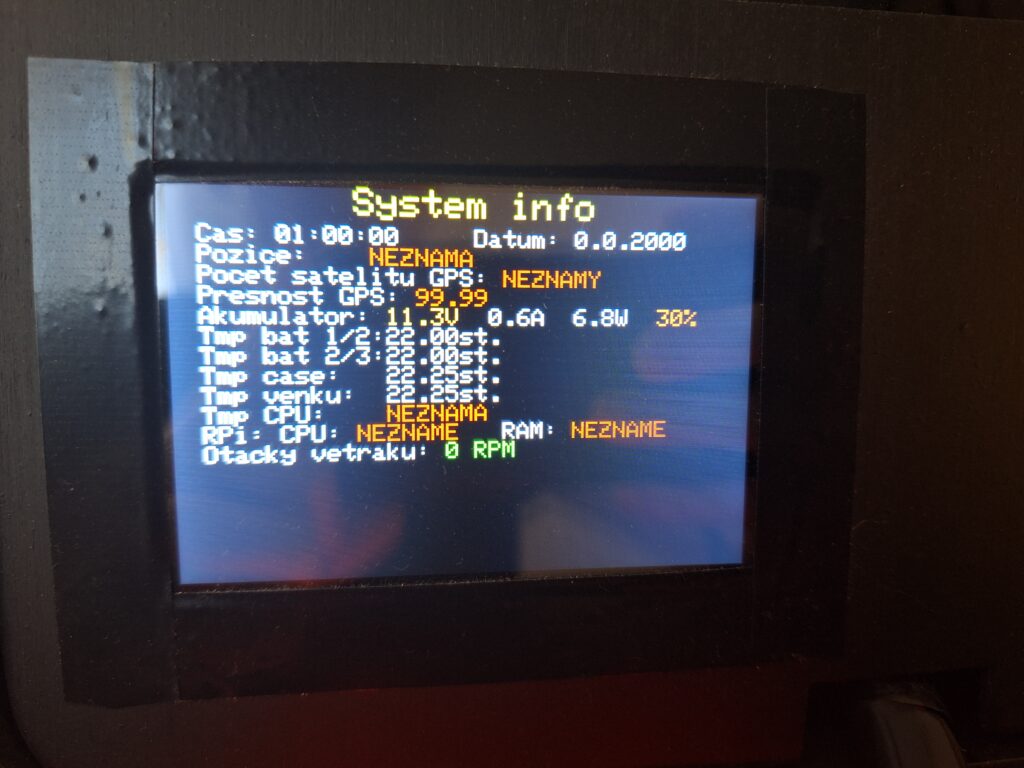
Pro monitorování systému jsem použil Arduino mega které načítá hodnoty, zobrazuje je na displeji, ovládá vizuální indikátor a řídí ventilátor.
Na displeji se zobrazují následující informace:
- aktuální čas a datum — načtené z GPS
- aktuální pozice — načtená z GPS
- počet GPS satelitů — načtený z GPS
- přesnost GPS — načtená z GPS
- napětí, proud, výkon a % – stavu akumulátoru
- teplota akumulátoru, kufru, venkovní a CPU
- využití CPU a RAM RPi
- otáčky ventilátoru
Kapacita akumulátoru v % je odhadnutá z napění a výkon ve W je vypočítaný z
napětí a proudu. Teplota CPU a využití CPU a RAM jsou načítané z RPi po sériové
lince. Teploty akumulátorů, v kufru a vzduchu venku monitorují čidla DS18B20 po 1-wire sběrnici. Ventilátor je použitý ns85b01-17f11 ze starého notebooku, otáčky se řídí pomocí PWM podle teploty a načítají přímo z ventilátoru.
Vizuální indikátor je 8ks Neopixel RGB LED diod které se rozsvěcí podle aktuálního stupně nebezpečí který je vypočítaný ze stavu akumulátoru, teplot a vytížení CPU a RAM.
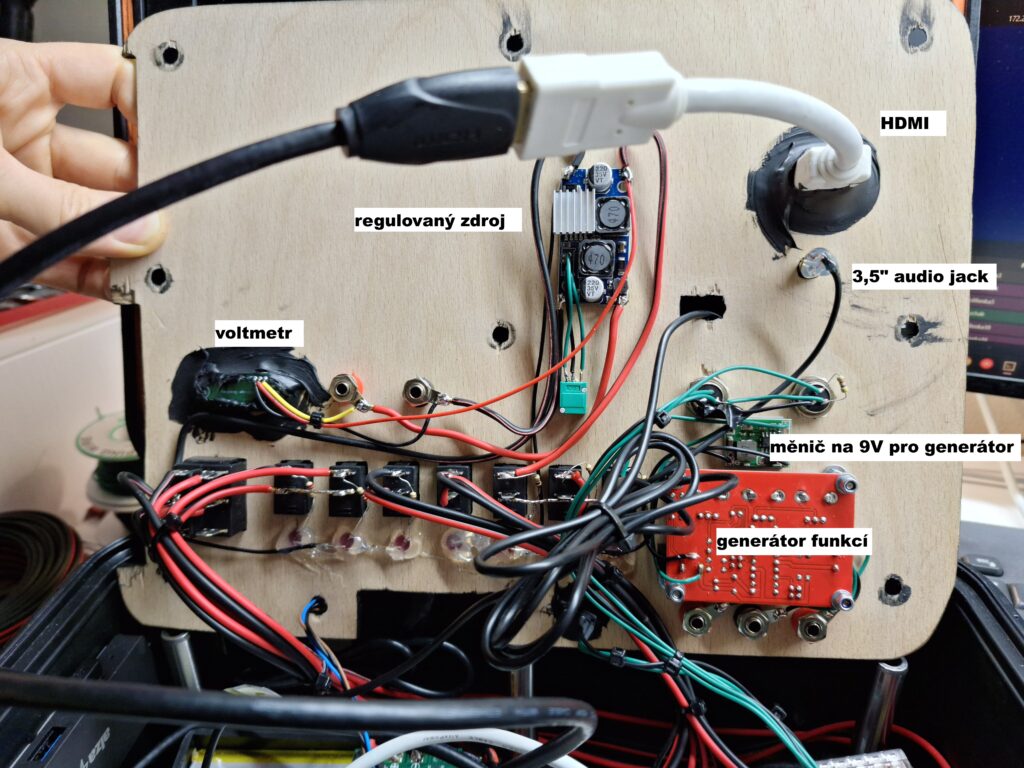
Hlavní panel je opět z 3mm překližky a připevněný na distančních sloupcích ve stejném stylu jako panel ve víku (akorát ve větším).
Na panelu najdeme tyto komponenty:
- hlavní vypínač -podsvícený — odpojuje akumulátor
- vypínač na RPi- s indikující LED
- vypínač na LCD RPi – s indikující LED
- vypínač na podsvícení systémového LCD – s indikující LED
- vypínač na I/O Arduino – s indikující LED
- vypínač na regulovaný zdroj — s indikující LED
- vypínač na osciloskop — s indikující LED
- vypínač na generátor funkcí — s indikující LED
- Generátor funkcí XR2206
- regulovaný zdroj s voltmetrem – 1,2-39,2V 3A
- I/O konektory
- 3,5″ audio jack z RPi
- HDMI konektor pro druhý monitor RPi
- klávesnici
- banánkové zdířky na výstupu zdroje a generátoru
- vizuální indikátor
- výstup USB 3.1 HUBu
- výdech ventilátoru

Pro možnost jednoduchého řízení a monitorování slouží zabudované Arduino UNO s vyvedenými piny na boční 9-pinový konektor a panelové I/O konektory. Připojené je přes vypínač k RPi pro možnost programování v terénu. Napájení je vedené zvlášť pro funkci i bez RPi.
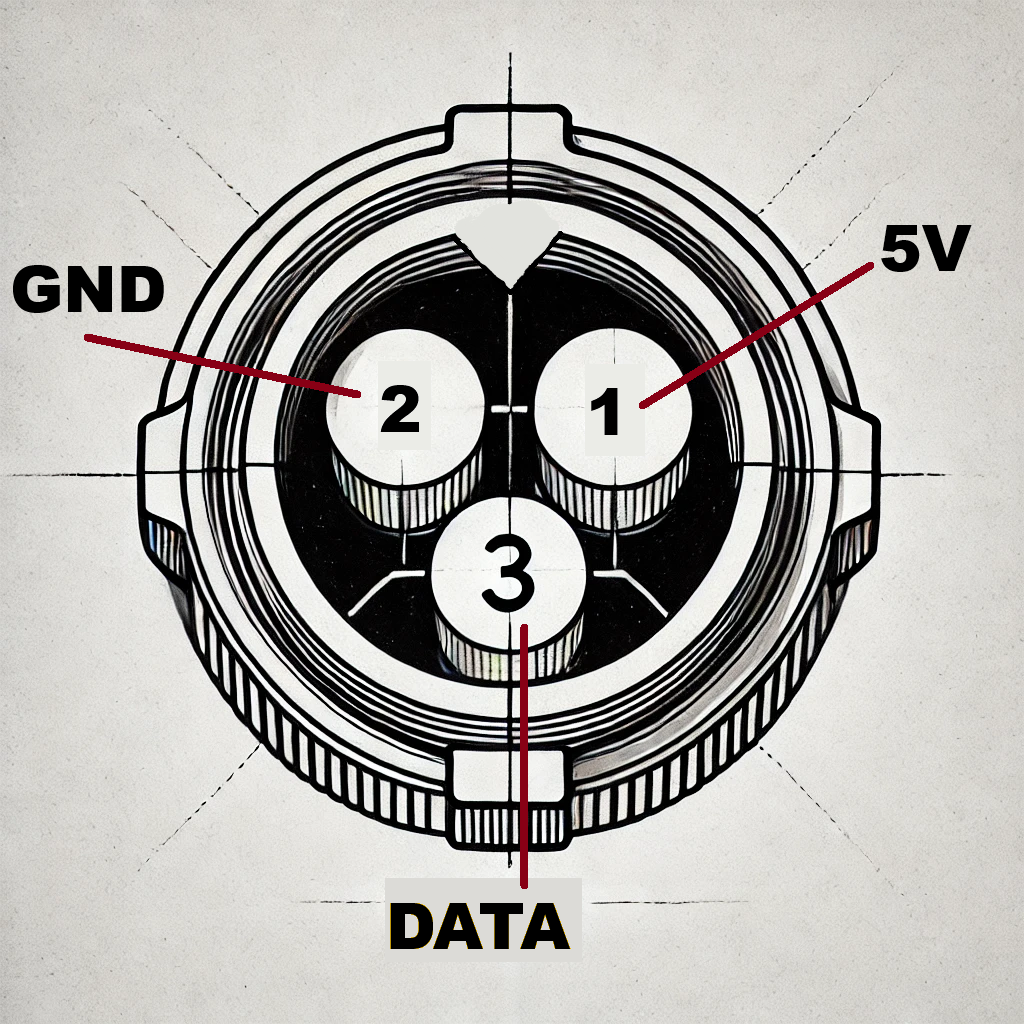
zapojení I/O konektorů
I/O konektory jsou zapojené podobně. Napájení je stejné jen levý konektor má DATA připojená na A0 (analogový vstup) a pravý konektor přes pull-up rezistor 4k7 na D9 (1-wire sběrnice).
Na boční 9-pinový konektor jsou vyvedené sběrnice I2C a SPI a pár analogových
vstupů. Zapojený je následovně:
- 1- +5V
- 2- D12 — MISO (SPI)
- 3- D13 — SCK (SPI)
- 4- A5- SCL (I2C)
- 5- D10 — SS (SPI) — PWM
- 6- D11 — MOSI (SPI) — PWM
- 7- D3- INT1 — PWM
- 8- GND
- 9- A4— SDA (I2C)
Nabíjecí konektor je připojený přímo na vstup BMS která si řídí balancování a
ochranu akumulátorů. Zapojený je následovně:
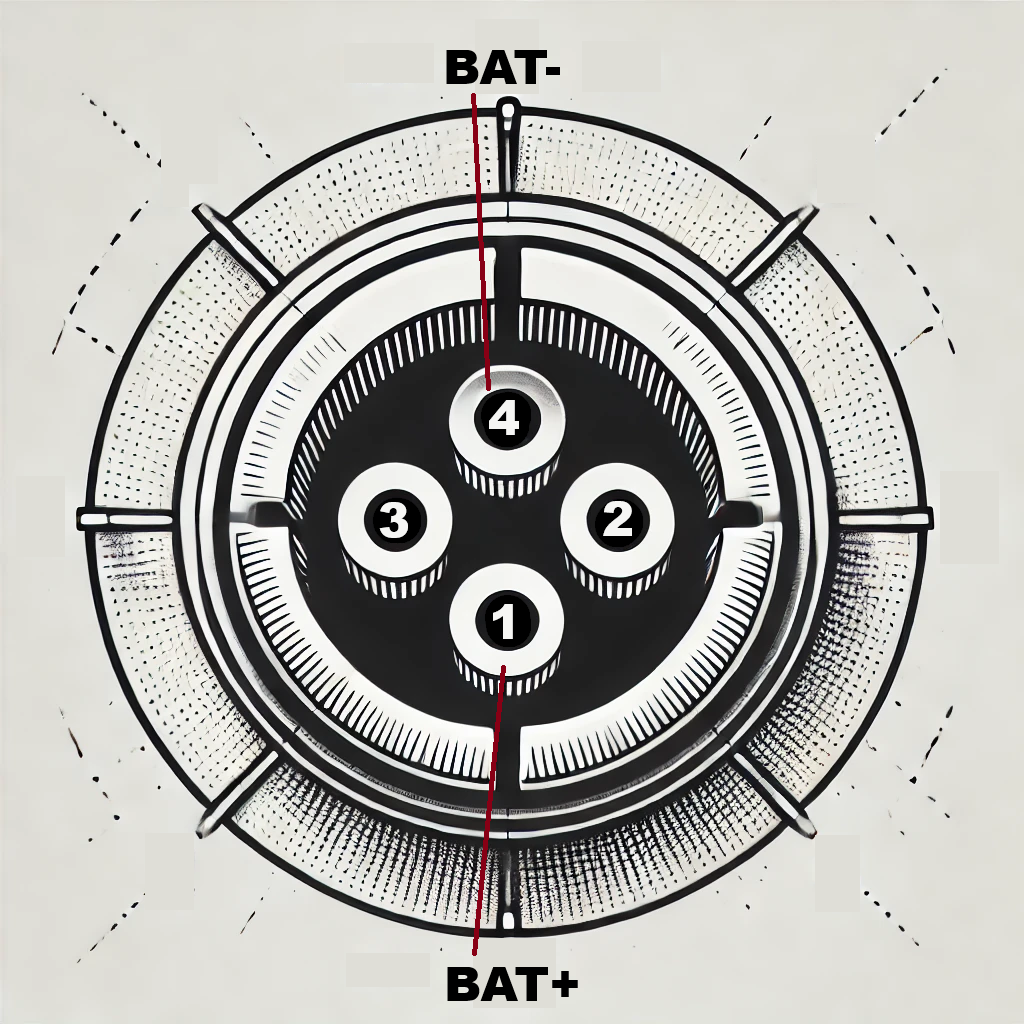
K nabíjení používám 2A nabíječku s připojenou redukcí, což dává cca 5h nabíjení.

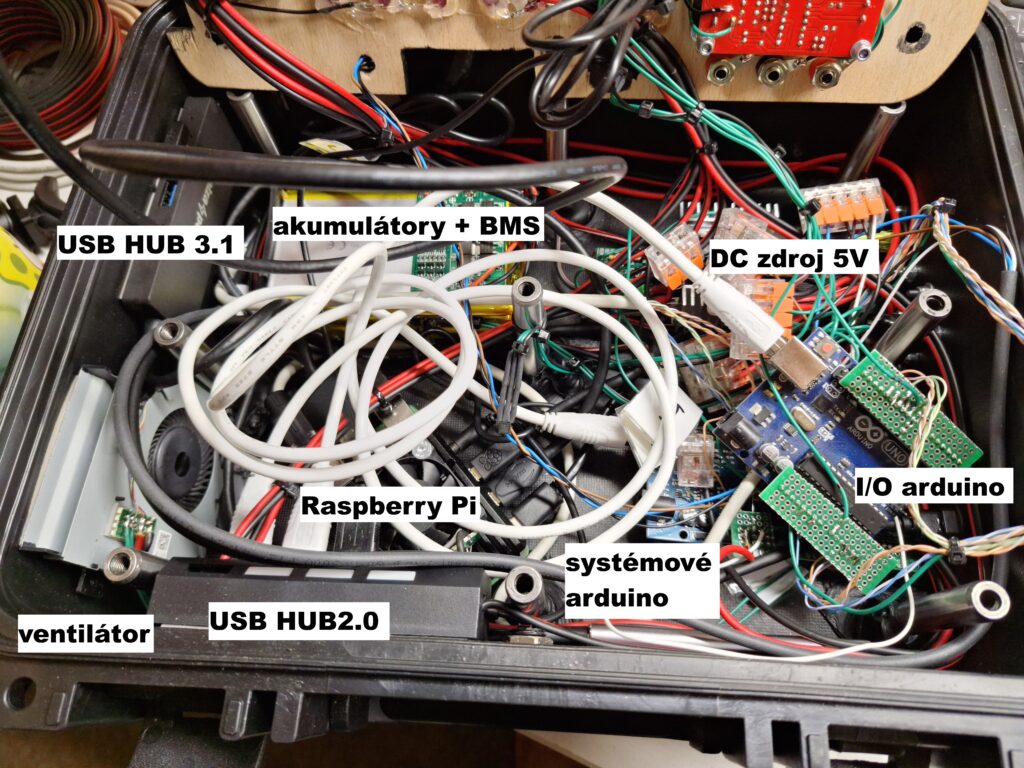
Vnitřní „uspořádání“
hlavní panel zespodu
SW výbava
OS pro RPi je originální Raspberry Pi OS. Ve kterém mám nainstalované tyto
programy:
- Arduino IDE
- DOSbox
- Chromium
- Python
- skript pro odesilání využití CPU a RAM a teploty CPU do systémového Arduina
- skript pro přepínání audio výstupu – HDMI/Jack
A ještě pár fotek

Projekt a článek byl vytvořen s podporou ChatGPT.